
(Helsinki, Mei 2021)
Tutorial robot ini mengikuti sumber berikut:
https://www.instructables.com/Make-a-Ticklish-Robot/
Bahan-bahan:
1. Pola robot dari kertas bisa diunduh di tautan di atas.
2. Servo motor, saya cuma gunakan satu, untuk satu tangan robot.
3. Selotip konduktor atau alumunium foil
4. Microbit, jumper wire, alligator clip, kabel USB
Prinsip kerja:
1. Apabila kaki robot yang ditempeli konduktor disentuh, hal ini akan mengaktifkan sensor capacitive touch di dalam Microbit
2. Sensor capacitive touch yang aktif membuat Microbit memerintah servo motor untuk bergerak
3. Karena servo motor bergerak, tangan robot jadi bergerak
Cara membuat:
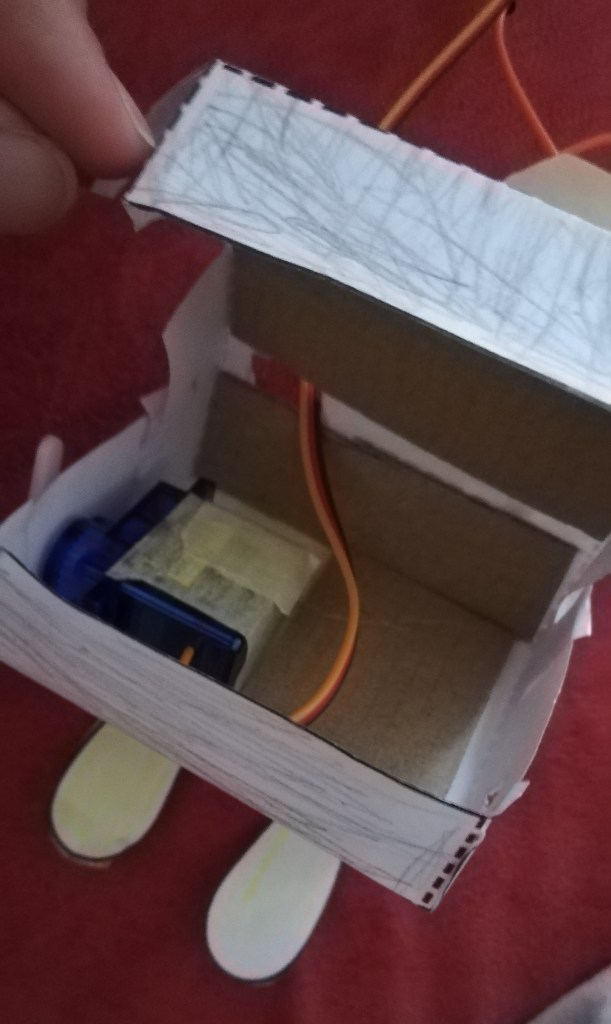
1. Buat kerangka badan robot dari pola yang tersedia
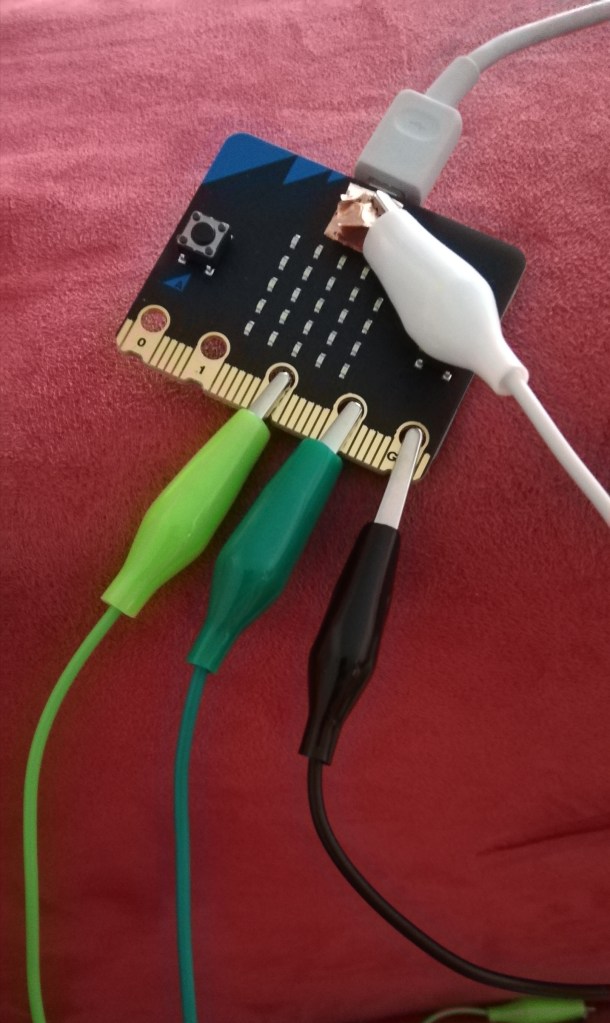
2. Tempelkan servo motor di dalam badan robot. Hubungkan servo motor ke Microbit dengan jumper wire dan alligator clip. Ada tiga pin yang harus dihubungkan, sinyal (kabel oranye), ground (hitam) dan voltase (merah).
3. Tempelkan selotip konduktor pada kaki robot. Hubungkan kaki robot dengan bagian capacitive touch Microbit menggunakan jumper wire dan alligator clip.
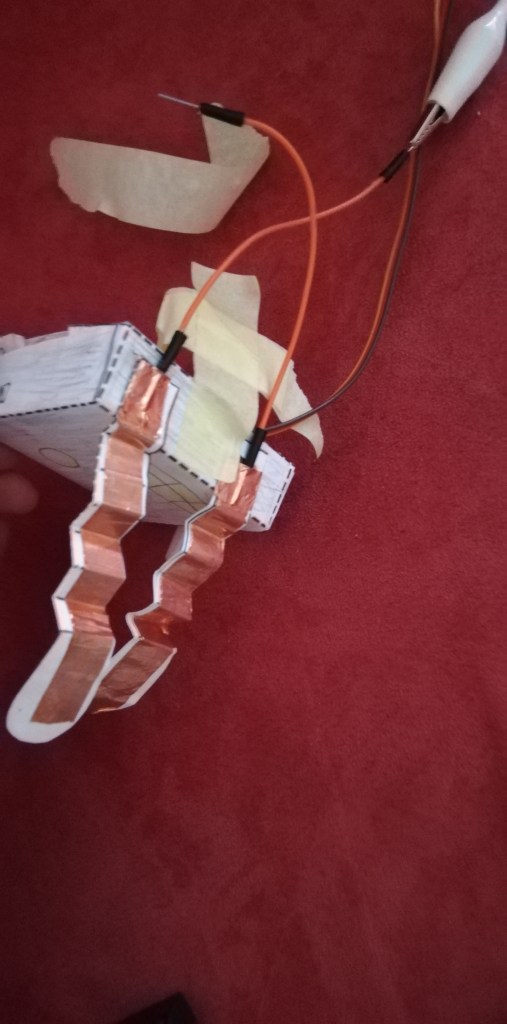
Bentuk rangkaian akhirnya:
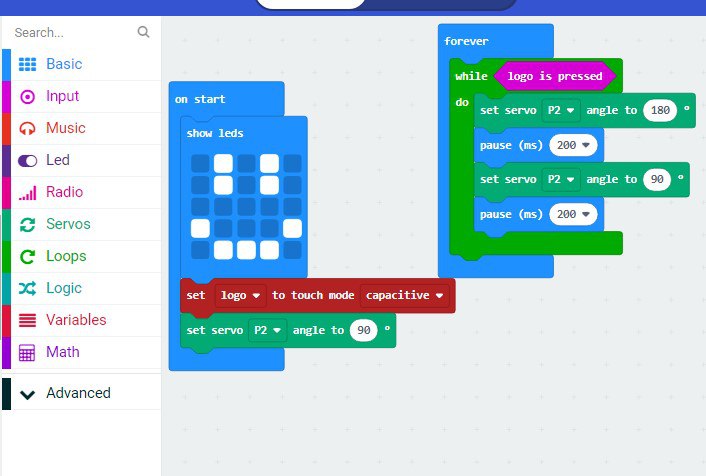
4. Program Microbit di MakeCode atau Scratch. Sesuaikan variabel di program dengan input pin yang kita pasang tadi (saya pakai pin P2). Unduh program ke dalam Microbit.
Selesai!
